Abstract
Nanofog is a highly advanced nanotechnology, which the Technocratic Union has developed as the ultimate multi-purpose tool. It is a user-friendly, completely programmable collection of avogadro (6 x!023) numbers of nanomachines that can form a vast range of machinery, from wristwatches to spaceships. It can simulate any material from gas, liquid, and solid, and it can even be used in sufficient quantities to implement the ultimate in virtual reality. ITx researchers suggest that more complex applications could include uploading human minds into planet-sized collections of Utility Fog. Active, polymorphic material, Utility Fog can be designed as a conglomeration of 100-micron robotic cells called foglets. Such robots could be built with the techniques of molecular nanotechnology.
Synergistic Combination With Other Technologies
The counterintuitive inefficiency in communications is an example, possibly the most extreme one, of a case where macroscopic mechanisms outperform the Fog at some specific task. This will be even more true when we consider nano-engineered macroscopic mechanisms. We could imagine a robot, human-sized, that was formed of a collection of nano-engineered parts held together by a mass of Utility Fog. The parts might include "bones", perhaps diamond-fiber composites, having great structural strength; motors, power sources, and so forth. The parts would form a sort of erector set that the surrounding Fog would assemble to perform the task at hand. The Fog could do directly all subtasks not requiring the excessive strength, power, and so forth that the special-purpose parts would supply.
Introduction
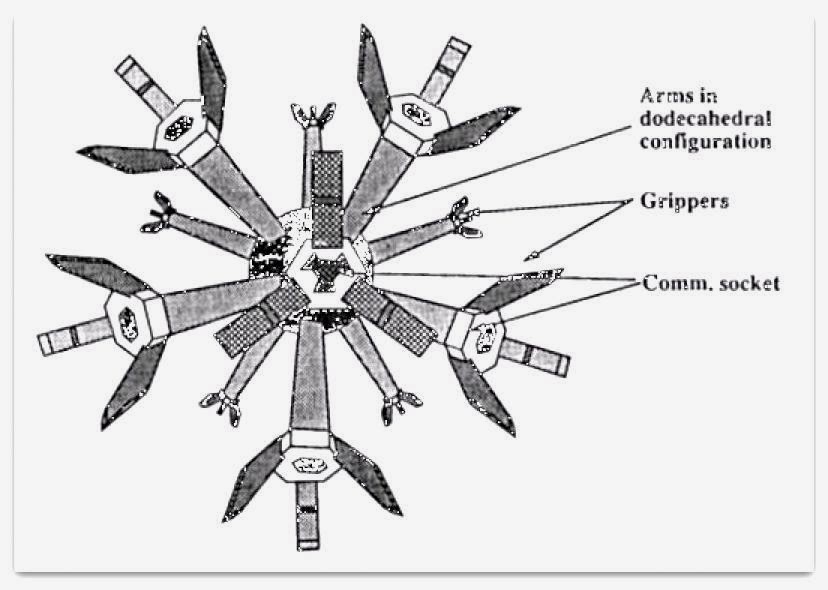
Nanotechnology is based on the concept of tiny, self-replicating robots. The Utility Fog is a very simple extension of the idea:Suppose, instead of building the object you want atom by atom, the tiny robots linked their arms together to form a solid mass in the shape of the object you wanted?. Then, when you got tired of that avant-garde coffee table, the robots could simply shift around a little and you'd have an elegant Queen Anne piece instead. The color and reflectivity of an object are results of its properties as an antenna in the micron wavelength region. Each robot could have an "antenna arm" that it could manipulate to vary those properties, and thus the surface of a Utility Fog object could look just about however you wanted it to. A "thin film" of robots could act as a video screen, varying their optical properties in real time.
Rather than paint the walls, coat them with Utility Fog and they can be a different color every day, or act as a floor-to-ceiling TV. Indeed, make the entire wall of the Fog and you can change the floor plan of your house to suit the occasion. Make the floor of it and never gets dirty, looks like hardwood but feels like foam rubber, and extrudes furniture in any form you desire. Indeed, your whole domestic environment can be constructed from Utility Fog; it can form any object you want (except food) and whenever you don't want an object any more, the robots that formed it spread out and form part of the floor again. You may as well make your car of Utility Fog, too; then you can have a "new" one every day. But better than that, the *interior* of the car is filled with robots as well as its shell. You'll need to wear holographic "eyephones" to see, but the Fog will hold them up in front of your eyes and they'll feel and look as if they weren't there. Although heavier than air, the Fog is programmed to simulate its physical properties, so you can't feel it: when you move your arm, it flows out of the way. Except when there's a crash!. Then it forms an instant form-fitting "seatbelt" protecting every inch of your body. You can take a 100-mph impact without messing your hair.
Other Desirable Limitations
In 1611, William Shakespeare wrote his final play, "The Tempest." 445 years later, an obscure science fiction writer named W. J. Stuart updated the Tempest's plot into a story called "Forbidden Planet," and created a modern myth.
Communications And Control
In the macroscopic world, microcomputer-based controllers (e.g. the widely used Intel 8051 series microcontrollers) typically run on a clock speed of about 10 MHz. They emit control signals, at most, on the order of 10 kHz (usually less), and control motions in robots that are at most 10 Hz, i.e. a complete motion taking one tenth of a second. This million-clocks-per-action is not strictly necessary, of course; but it gives us some concept of the action rate we might expect for a given computer clock rate in a digitally controlled nanorobot.
No comments:
Post a Comment